 Sherwin Salemi
Sherwin SalemiOmni-Wheel

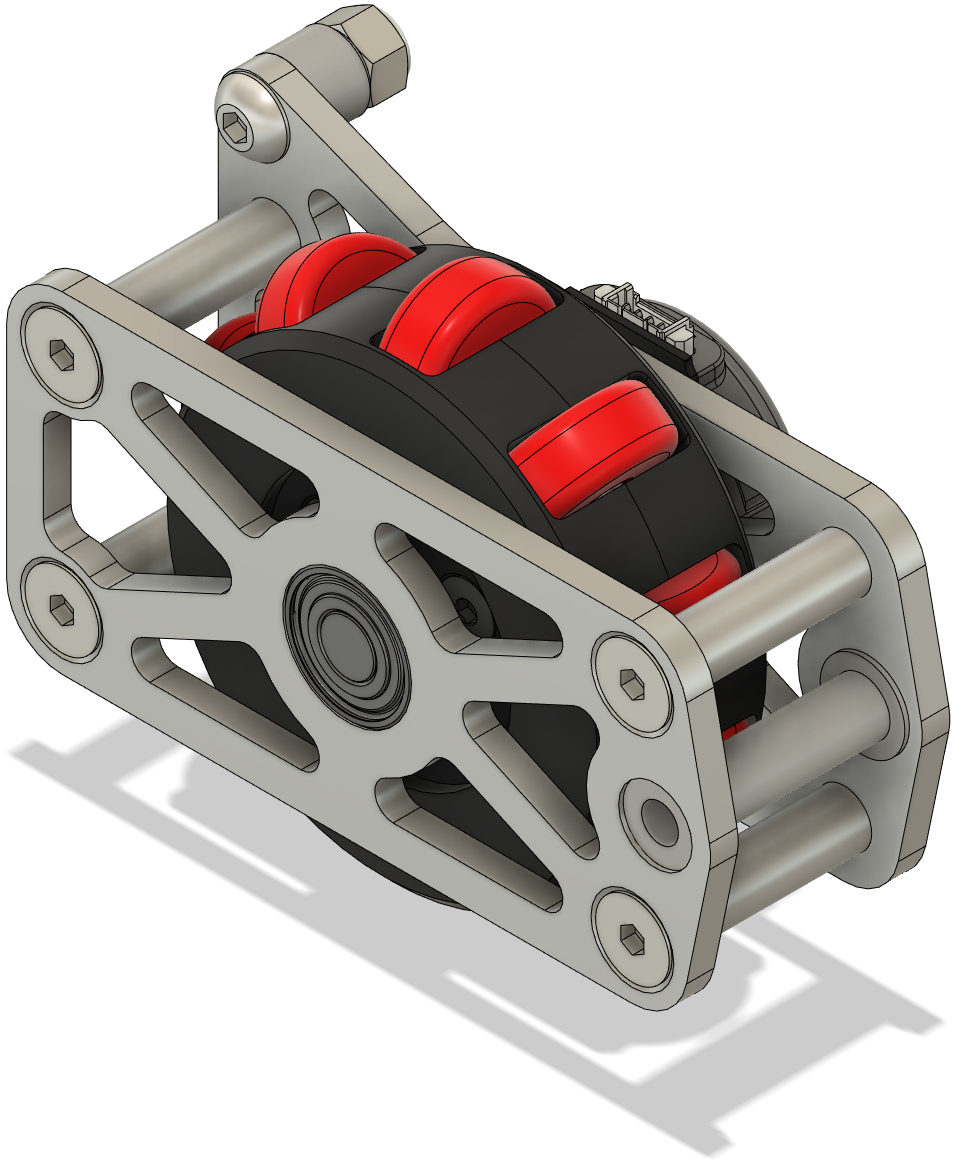
In FTC robotics, odometry is extremely important. Odometry is the process of tracking robot position by measuring the rotation of "omni-wheels" that contact the ground. Precision is critical, and the standard wheels had a fatal issue: the gap between the wheel body and the ground was so small that when the robot sank a few millimeters into the squishy foam floor, the body of the wheel would drag against the ground.
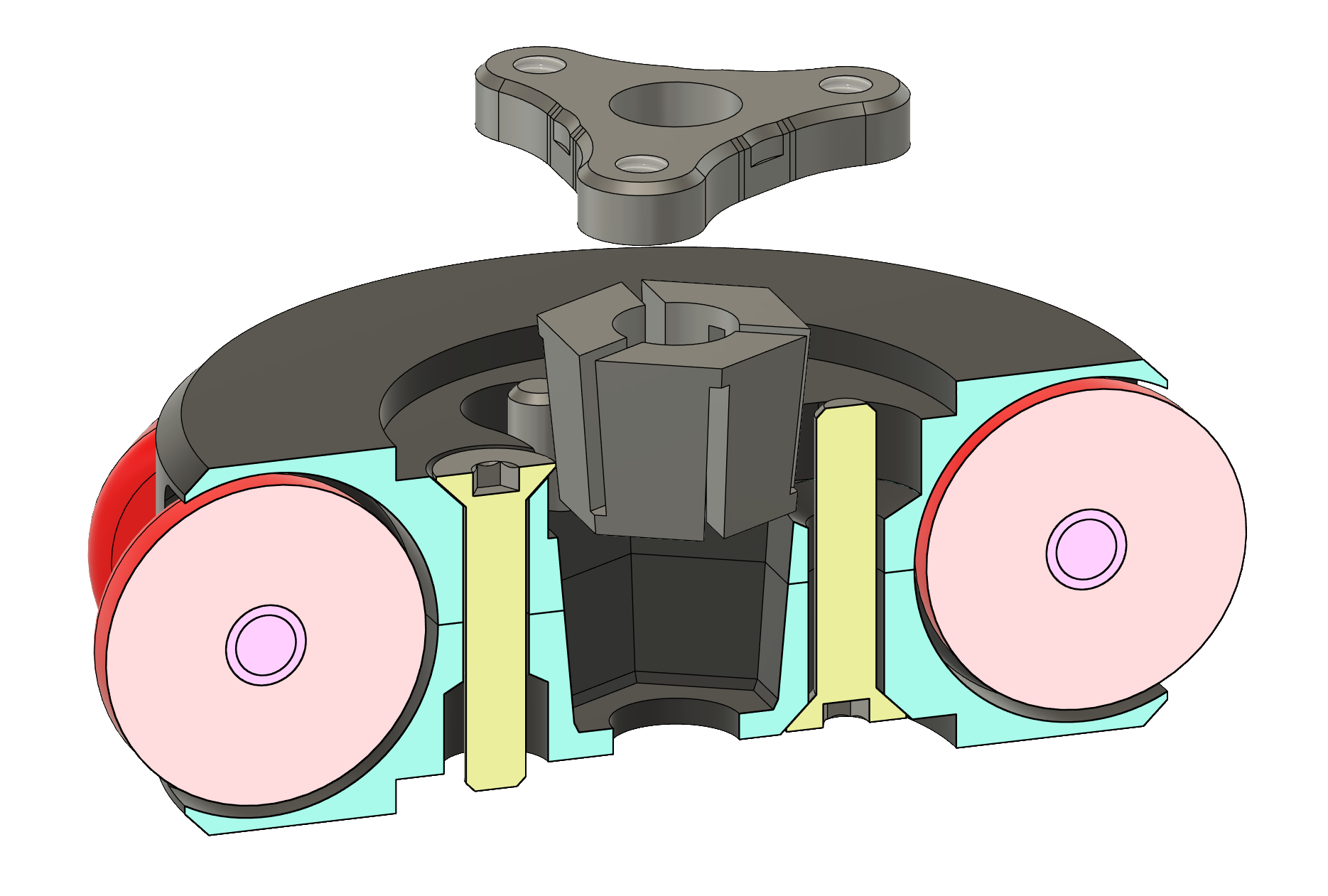
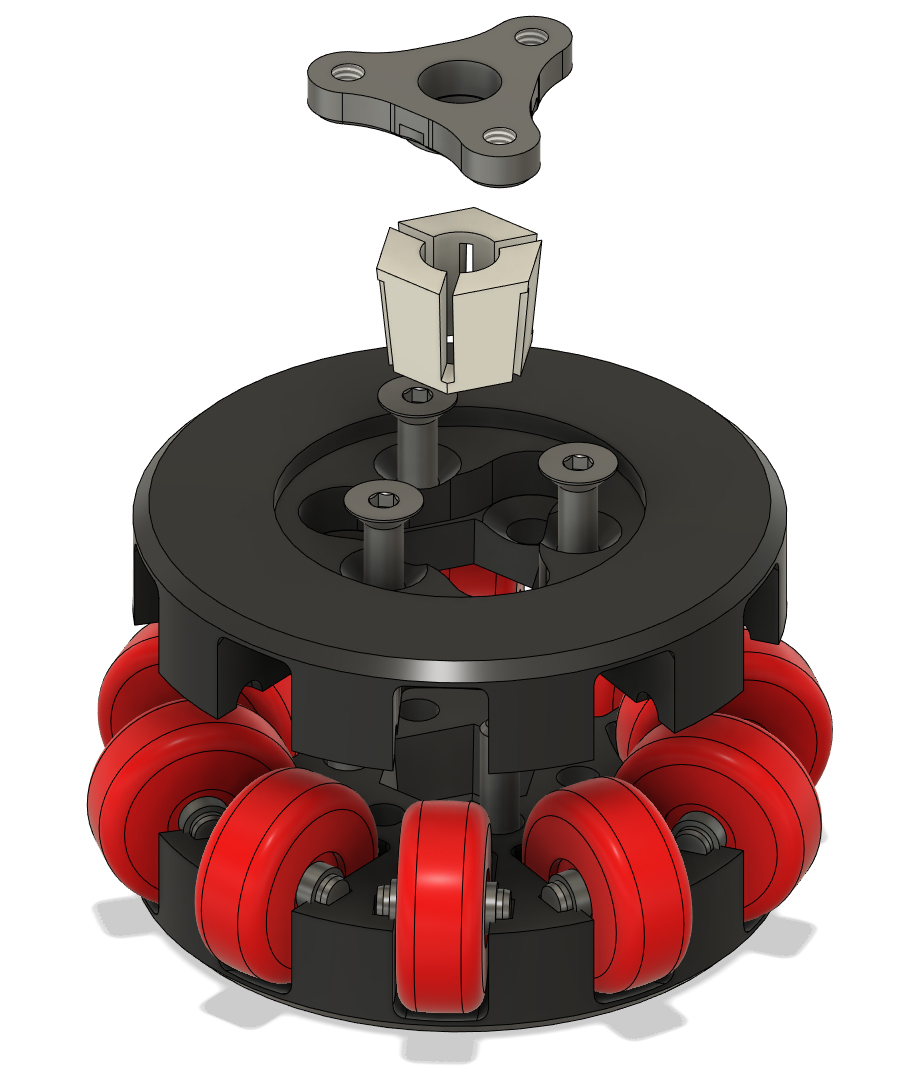
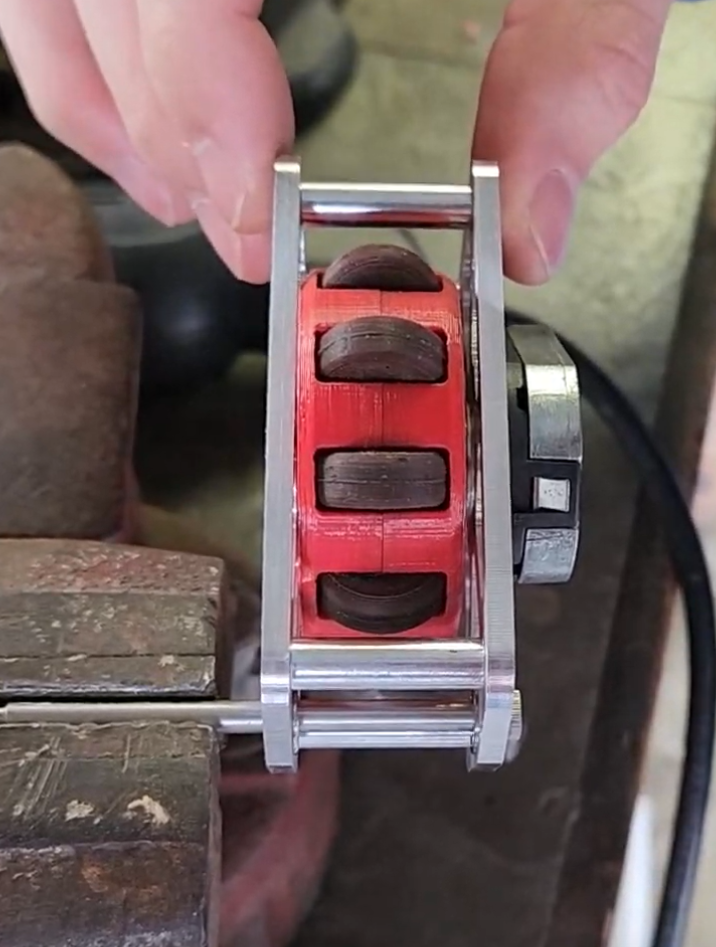
I set out to make a custom wheel with high diameter rollers that would fix this issue. I also came up with a CNC-inspired collet clamping system that would make the wheel extra-compact. The wheels have a 3D printed body and custom polyurethane molded rollers on brass bushings.
To validate their performance, I made a SteamVR based tracking system to measure the robot's absolute position. It uses a SteamVR Vive Tracker mounted on the robot, and a custom C++ program that records the robot's absolute position on the field. It has a calibration routine to find the plane of the field. We compared the data from the odometry wheels with the SteamVR data during testing to measure performance.
These wheels ran on our award winning robots for two years, including at the World Championships in 2024.


Sherwin Salemi