 Sherwin Salemi
Sherwin SalemiYonder Dynamics
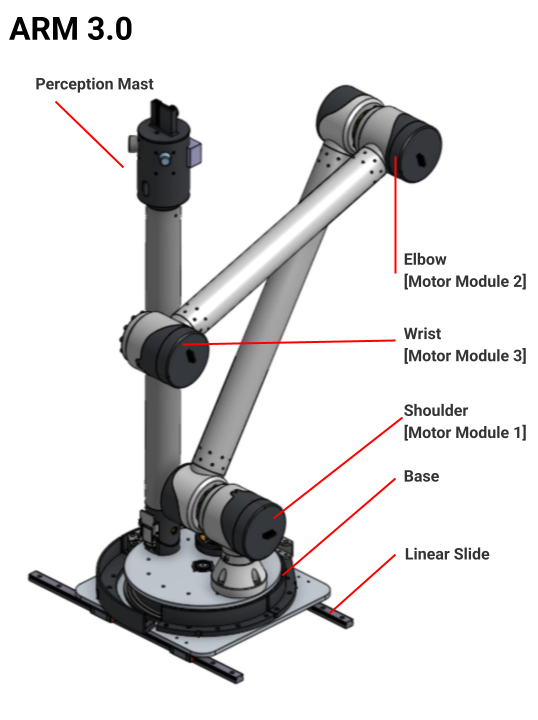
Yonder Dynamics is the robotics team at UCSD which competes in the annual University Rover Challenge (URC). On the team, I'm currently working on a precision turntable base for our rover's robotic arm, as well as a custom bidirectional cable chain designed with the optimal reverse bend radius for this setup.


Sherwin Salemi